GG修改器破解版下载地址:https://ghb2023zs.bj.bcebos.com/gg/xgq/ggxgq?GGXGQ
大家好,今天小编为大家分享关于gg修改器游戏减速_GG修改器游戏变速的内容,赶快来一起来看看吧。
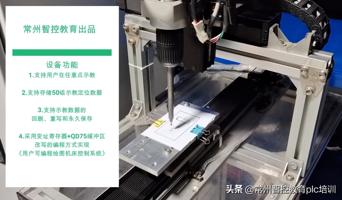
三菱公司QD75轴定位模块的表格化编辑方式真的适合我们吗?
本文教你如何使用改写寄存器参数的方式实现
【用户可编程、可示教的多轴综合运动控制系统】
作者:陆冯
注意:【本文如有不当之处,请各位高手指正】
众所周知,日本三菱集团是一家“富可敌国”的企业,它为日本军队生产过其在第二次世界大战中的多数主战装备,如:零式战斗机、航空母舰、坦克等等。目前,三菱旗下拥有24家核心事业部,涵盖轨道交通、化工、工业自动化,以及航天火箭发射等各个领域。可以称为是:“百年沉浮中的三菱集团”。抛开家仇国恨不谈,我个人从一个看待“企业”的角度,非常欣赏它。
我作为一名电气工程师,在工作中,经常用到三菱电机公司生产的可编程控制器、伺服,以及触摸屏产品。这些工业自动化产品,被三菱电机公司自己称为:“FA自动化产品”,这些产品,我从FX1NPLC到三菱L系列PLC、从MRJ2到MRJ5系列伺服、从A系列到F系列变频器,我都接触了一遍,甚至包括他们的三菱机器人。
总的来讲,三菱电机公司的FA自动化产品线,整体架构清晰、价格便宜、软件高低搭配(并且支持各个软件平台之间的交互仿真),在中国市场可以说,也算是占了个半壁江山!
可是,当我这几天在搞一个四轴综合运动控制系统时,我对它Q系列PLC中QD75定位模块的表格化的编程引导方式,产生了更加深刻的思考,觉得表格化的方式有缺点,并不合适我们更加简便地搭建运动控制系统,所以我采用我自己的方式去进行了编程,抛弃了它的表格式编程引导。
当然,也正是因为这台设备使用我自己独有的编程方式,能正常运行,并且成功实现“用户可编程、可自由示教”功能,我才敢写这篇文章,出来献丑………..

我们这一次的设备采用的是三菱Q系列的PLC+QD75定位模块来实现四轴的定位控制,在这个表格中,我们可以迅速完成对各个位置点的定位数据编辑,并且可以灵活地配置各个定位数据的插补方式、M代码、停留时间,甚至非常人性化地设置了“块启动”这样的数据表格,可以重复调用定位数据,实现复杂的定位数据调用逻辑。

我3年前,第一次接触QD75P4N定位模块,看到这个QD75的定位表格,给我的感觉就是清晰明了,所有的定位数据,都在这个表格中,但是要是想修改定位数据,就必须打开软件,重新设置这个表格,在之前做过的很多设备现场中,我都是这么干的——重新写表格、下载——重新写表格、下载………..
无限循环………..
我当时就在想,能不能有一个一键示教指令,可以不使用GXworks2软件重新下载程序和数据,通过HMI的操作就能实现定位数据的更改或示教。我去查阅了一下相关资料,三菱QD75手册中,有一条指令叫TEACH指令,就是示教指令。
它的使用非常复杂,我在网上好不容易找到一个老师讲解的TEACH指令讲解视频。它讲得非常详细,但是由于这个指令涉及的操作数实在太多,我很认真地听了4-6遍,搞明白了,也会用,但是我心里,总是在想着,应该有更加OK的方法,所以我一直在寻找。
这种想法在脑子里面已经呆了有几年的时间……..
这一次,老天又给我一次摸到QD75定位模块的机会,机不可失,时不再来。所以我下定决心,一定要实现—— 【用户可编程、可示教的多轴综合运动控制系统】
当然,一腔热血是办不了事情的,还得慢慢地、一页一页地去翻手册,终于在不间断投入27个小时的努力下,我找到了实现这样的功能的编程方式和编程架构!并且在设备上使用,最后取得成功,说实话,有点碰运气的成分……
那么接下来,我就来说说我的解决方案吧!
正文开始!
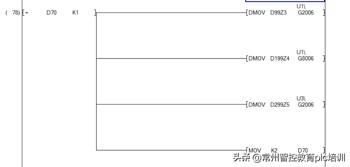
首先,我们在写入每一行的定位数据时,我们都要在QD75定位模块的轴1、轴2,或者3轴、4轴的定位数据表格中写入数据,如下图:

那么这个时候问题来了,我们所设置的表格,里面的每一个数据,一定是被Q系列PLC放在哪个存储器或者缓冲存储区里面去了。我们需要去找到它!它们被放在哪个位置!
我终于在翻阅QD75手册时,发现在手册的最后,有一个附录,如下图:
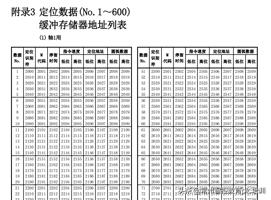
这个附录成功地解开了我所有的疑惑:
1.从QD75模块的第2000到第7999缓冲存储区,是存放QD75定位模块轴1定位数据的缓冲存储区;
2.这些存储区,每一个所占用的数据长度为16位;
3.我们在表格中所填写的每一行定位数据,包括:第几号定位数据、运行模式、控制方式、插补对象轴、加减速时间、M代码、停留时间、圆弧地址、定位地址,都被保存在10个缓冲存储区当中;
例如:
我们QD75定位模块的轴1的1号定位数据,就被写在了G2000到G2009这10个缓冲存储区当中,其中G2004和G2005两个16位缓冲存储区共同组成的32位缓冲存储区,存放的是我们设置的“定位速度”;G2006和G2007两个16位缓冲存储区共同组成的32位缓冲存储区,存放的是我们的“定位地址”。
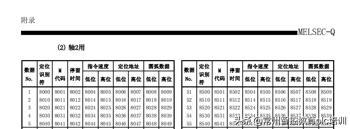
那么同理,经过查找发现:
QD75定位模块的轴2的1号定位数据,就被写在了G8000到G8009这10个缓冲存储区当中,其中G8004和G8005两个16位缓冲存储区共同组成的32位缓冲存储区,存放的是我们设置的“定位速度”;G8006和G8007两个16位缓冲存储区共同组成的32位缓冲存储区,存放的是我们的“定位地址”。
那么,当我们完成上述内容的发现,整个问题变得简单了!
自此,我们将——重新定义QD75定位数据的编辑方式!彻底抛弃由三菱电机公司规定的表格化定位数据编辑方式;彻底告别编辑定位数据表格,再去下载定位数据表格的无限循环;将从底层上实现轴定位运动的逻辑闭环,为【用户可编程、可示教的多轴综合运动控制系统】的实现,确立了先决条件。
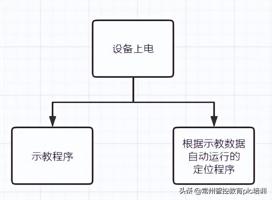
我们先将程序分为两个部分,如下图:
首先,是我们的“示教”程序,如下图:

我们采用变址寄存器Z+32位数据寄存器D组合的方式,实现对3个轴当前位置数据的记录,当我们置位M100辅助继电器,3个轴的数据被记录到不同的数据寄存器D中,并在T50时间继电器延时0.5秒后,也就是记录完成后,M100辅助继电器将被T50的常开触点复位,并把X、Y、Z轴对应的“数据记录”变址寄存器Z加2,实现每个轴的32位数据寄存器D地址向后偏移2个编号,保证我们的下一组数据在记录时,能够成功保存到下一组32位数据寄存器D当中。我在上图的程序中,把X、Y、Z三个轴的数据分别保存在D99-D198、D199-D298、D299-D398这三个范围的数据寄存器D当中,其中每个轴占用100个16位数据寄存器,那么我这个程序就只能保存50条示教数据。
那么想要保存更多咋办?很简单,把示教数据保存范围增大就可以了,Q系列PLC里面数据寄存器多着呢,绝对够用!比如:把X、Y、Z三个轴的数据分别保存在D0-D999、D1000-D1999、D2000-D2999这三个范围的数据寄存器D当中,其中每个轴占用1000个16位数据寄存器,那么这样就可以保存500条示教数据。
但是还有件事情别忘了,记得把这些数据寄存器,就是你保存X、Y、Z三个轴示教数据所用到数据寄存器D,要在工程PLC参数设置中,改为“掉电保持型”,让它们具备锁存功能,否则设备一掉电,数据全没了,每次开机都要重新示教,这就太离谱了。
数据寄存器D在PLC参数中设置为“掉电保持型”,操作如下图:

接下来,我们要继续来写示教程序,有人这时候疑惑了,我们不是已经完成了3个轴的当前位置记录,还有什么需要补充的吗?其实,这时也是考验一个工程师的时候,我们的示教程序目前能记录,但是如果记录错了,想删除刚才记录的这个数据怎么办?
所以,我们还要再设计一个“回删”程序,满足用户修改示教数据的需求,如下图:

我们同样采用变址寄存器Z+32位数据寄存器D组合的方式,实现对3个轴的上一个位置数据的清除,当我们置位M101辅助继电器时,将用M101辅助继电器的上升沿先把3个轴对应的“数据记录”变址寄存器Z进行1次减2,实现每个轴的32位数据寄存器D地址向前偏移2个编号,回到上一个已经示教完成的数据寄存器D的地址,然后把“0”放进3个轴对应的地址当中,从而实现,对上一个已经示教完成的数据的清除,这样就可以重新示教新的、正确的定位数据了。
当然,我们可以更加大胆地想一下,我们用一个没有使用过的变址寄存器Z,比如说“Z10”,在触摸屏上设定“Z10”的值,来修改我们3个轴的示教数据寄存器D的地址,然后再配合我们的“修改功能”按钮——【是不是这样,我们就可以任意修改我们所有记录数据的值,想改几号数据,就改几号数据???】
上述方法我已经试验过,是可行的。因此,我们在PLC编程中,要胆大心细、勇于创新,这样才能写出“出其不意”的编程效果。
接下来,就是我们的“自动运行”程序了,如下图:
同样,我们采用变址寄存器Z+32位数据寄存器D组合的方式,实现对3个轴当前位置数据的读取,将我们在人工示教时3个轴的数据写入到我们QD75定位模块的每个轴的1号定位数据当中。

然后我们,将把每个轴的1号定位数据放进它们对应的轴启动编号寄存器中,并给予启动信号,这样我们的3个轴将运动到我们示教的第一组定位数据位置,到达我们示教的第1个点。那么当我们走完第1个点之后,我们如何继续往下走呢?

此时,我们将会把3个轴对应的“数据读出”变址寄存器Z进行1次加2,我们将“程序状态器”D70置为1,再次回到第1步,就可以了。
但是!!!请大家注意:我们程序一共可以示教50组定位数据,如果用户只示教了30组,我们不做任何程序上的判断,就直接这样一直循环下去,后面20组数据,3个轴的定位数据由于没有示教,都是“0”,相当于让3个轴回20次原点,合适吗?
所以,我们要进行程序上的判断,那么我们如何知道用户示教了多少个点呢?或者说如何判断,下一组即将执行的定位数据是没有经过用户示教的、是无效的呢??
程序如下图:

我们将经过“数据读出”变址寄存器Z偏移后的示教数据寄存器D里面的数据读出来,与“0”进行比较,如果3个轴数据都为“0”,那么就证明下一组即将执行的定位数据是无效的,我们直接将“程序状态器”D70置为100,让设备去复位就可以了,复位完成后等待下一次启动。但是如果我们的3个轴的定位数据有1个不为“0”,就证明下一组即将执行的定位数据是有效的,我们将“程序状态器”D70置为1,再次回到第1步,让设备运动到下一个点。
如此循环往复,我们的设备将按照我们的示教数据,不断地跑完每一个示教过的定位点,实现【用户可编程、可示教的多轴综合运动控制系统】的所有技术要求!!!
在本文最后,送给大家几段话:
1.编写PLC程序的目的,是为了让设备安全、可靠、准确、高效地运行起来,任何设备的PLC程序应当具备“安全性”、“正确性”、“可扩展性”、“可读性”和“可移植性”5个方面的特性。
2.在PLC技术日新月异的今天,我们要准确分析各大PLC厂商的编程软件中,不断更新的“编程引导方式”,这些新的引导方式,可能在某种程度上,降低了我们的编程复杂程度,但是我们始终要——透过现象看“本质”!存优祛劣!
3.我们这个专业,是一个“涉及面及其广泛”的专业,从硬件到软件,一个都不能落下,而且各大PLC厂商的技术更新速度很快,因此——我们要在战略认知上有“万变不离其宗”的底气,但是在战术认知上,还是要去明白“勤能补拙是良训”这个道理的,一定要多查百度、多看手册、多动手练习。
本文代表陆冯个人观点及技术分享,侵删
今天《三菱公司QD75轴定位模块的表格化编辑方式真的适合我们吗?》小智就分享到这,大家可以收藏使用。
以上就是关于gg修改器游戏减速_GG修改器游戏变速的全部内容,希望对大家有帮助。

gg游戏修改器修改内存,为什么 gg游戏修改器修改内存是一个强大的游戏工具? 大小:9.59MB9,901人安装 如果你是一个玩家,那么你一定知道如何使用 gg游戏修改器修改内存。这个工具是一款……
下载
gg游戏修改器叫什么,GG游戏修改器:玩游戏的不二选择 大小:15.61MB9,465人安装 现如今,网游也已经是大多数游戏玩家的首选。不过,网游中的游戏平衡性很容易被破坏……
下载
Gg修改器免root内购,使用Gg修改器免root内购的优势 大小:15.78MB9,637人安装 现如今,市面上有很多优秀的应用软件,但是很多软件都会存在一些内购或者功能受到限……
下载
gg修改器这么root,GG修改器:终极ROOT利器 大小:18.60MB9,781人安装 在安卓手机的世界里,它是一把不可多得的神器,一款可谓终极的ROOT工具——GG修改器。……
下载
gg免越狱苹果游戏修改器,GG免越狱苹果游戏修改器为你带来全新游戏体验 大小:16.47MB9,854人安装 在苹果游戏界,越狱是大多数玩家选择的一种方式。但是,随着苹果反破解技术的升级,……
下载
gg修改器有没有免root,神器GG修改器,免root轻松修改游戏 大小:17.74MB9,506人安装 GG修改器是一款在游戏领域内广受欢迎的辅助软件,它可以为你的游戏带来无限乐趣和挑……
下载
游戏gg修改器中文,游戏gg修改器中文-一个神奇的游戏助手 大小:16.95MB9,842人安装 在当今的游戏界中, 玩家越来越需要一些神奇的游戏助手来提高游戏过关的体验。其中,……
下载
GG游戏修改器棋牌,GG游戏修改器棋牌:让游戏变得更加好玩 大小:10.49MB9,523人安装 现如今,棋牌游戏已经成为最受欢迎的游戏之一,而GG游戏修改器就是为这些棋牌游戏玩……
下载
手机gg修改器免root,手机gg修改器免root让你畅玩游戏的利器 大小:10.51MB9,567人安装 随着智能手机的普及,越来越多的人开始喜欢在手机上玩游戏,但是一些游戏因为一些限……
下载
gg修改器最新框架,gg修改器最新框架:让游戏成为你的天堂 大小:15.11MB9,863人安装 随着游戏的普及和玩家的需求不断增长,更多的游戏爱好者开始尝试改变游戏的规则,让……
下载